
گینٹری روبوٹ ایک کالم فریم، X-axis جزو، Y-axis جزو، Z-axis جزو، فکسچر اور کنٹرول باکس پر مشتمل ہوتا ہے۔
یہ ایک مکمل خودکار صنعتی سامان ہے جو مستطیل X، Y، Z تھری ڈائمینشنل کوآرڈینیٹ سسٹم پر مبنی ہے، جو ورک پیس کی پوزیشن کو ایڈجسٹ کر سکتا ہے یا ورک پیس کی رفتار کو محسوس کر سکتا ہے۔ اس کا کنٹرول کور صنعتی کنٹرولرز کے ذریعے نافذ کیا جاتا ہے۔
کنٹرولر مختلف ان پٹ سگنلز کا تجزیہ کرتا ہے اور ان پر کارروائی کرتا ہے، منطقی فیصلے کرتا ہے، پھر X، Y، اور Z محوروں کے درمیان مشترکہ حرکت کو مکمل کرنے اور مکمل طور پر خودکار آپریشن کے عمل کے مکمل سیٹ کا احساس کرنے کے لیے ہر آؤٹ پٹ جزو کو عملدرآمد کے احکامات جاری کرتا ہے۔
یہ پروڈکٹ اسمبلی اور نقل و حمل، کنویئر سسٹم، اور بغیر پائلٹ کے کام کی جگہوں میں استعمال ہوتا ہے۔ اسے عارضی اسٹوریج اور لاجسٹکس کے لیے ایک اہم پردیی آلات کے طور پر استعمال کیا جا سکتا ہے اور آسانی سے استعمال کے لیے میزبان آلات کے ساتھ لچکدار طریقے سے ملایا جا سکتا ہے۔ ایپلی کیشن انڈسٹریز جن میں شامل ہیں: حتمی اسمبلی، ذیلی اسمبلی، پروسیسنگ، ٹیسٹنگ، ڈیبگنگ اور مصنوعات کی نقل و حمل وغیرہ۔
مصنوعات کی خصوصیات مختلف قسم کے مواد کی ہینڈلنگ میں کم کارکردگی یا زیادہ ہینڈلنگ کے خطرات کے مسائل کو حل کرنے میں صارفین کی مدد کرنے کے لیے ہیں، تاکہ آسانی سے اور فوری طور پر ہینڈلنگ کے خطرات کو کم کیا جا سکے، وقت، محنت، مزدوری کو بچایا جا سکے اور یہاں تک کہ لیبر کو تبدیل کیا جا سکے۔
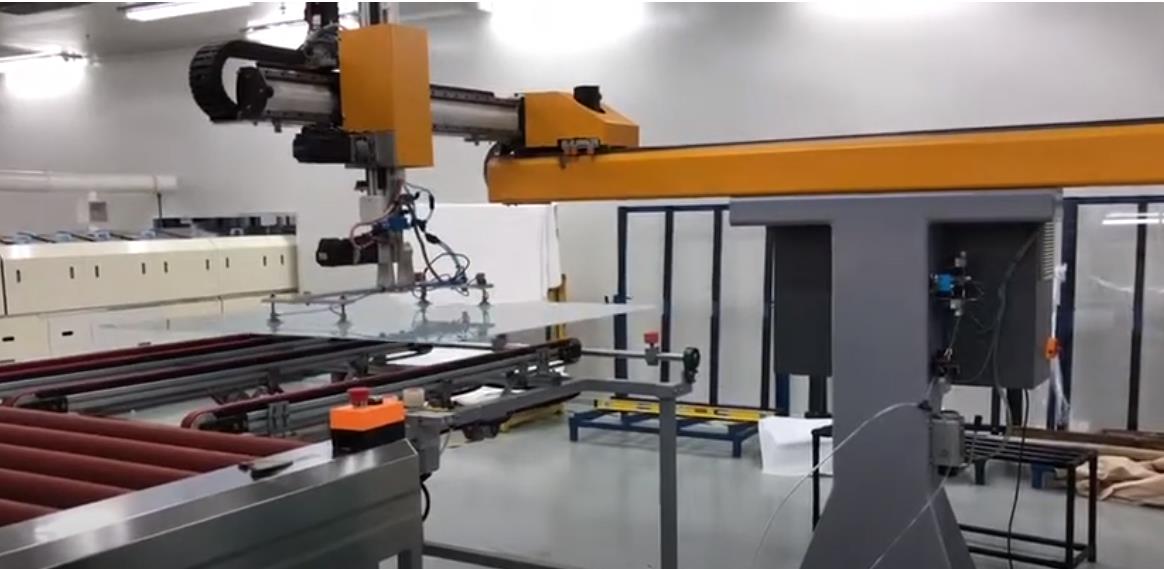
 شیشے کے لیے اس گینٹری ٹرس ہینڈلنگ ڈیوائس میں کالموں پر نصب کالم اور کراس بیم شامل ہیں۔ کراس بیم سلائیڈ ریلوں کے ساتھ نصب ہیں۔ سلائیڈ ریلز ایک ٹرانسورس سلائیڈنگ ڈیوائس کے ساتھ لگائی جاتی ہیں۔ ٹرانسورس سلائیڈنگ ڈیوائس عمودی سلائیڈنگ ڈیوائس اور نیومیٹک سکشن کپ ڈیوائس کے ساتھ نصب ہے۔ یہ محسوس کیا جا سکتا ہے کہ نقل و حمل کا طریقہ کار تین جہتی جگہ میں ایک مقررہ نقطہ پر حرکت کرتا ہے، سکشن کپ کے ذریعے شیشے کو چوستا ہے، پہلے X-axis پر پیچھے سے حرکت کرتا ہے، پھر 90 ڈگری کو متعین مقام پر پلٹتا ہے، اور پھر اوپر کی طرف بڑھتا ہے۔ اور نیچے Y-axis پر۔ سیٹ پوزیشن پر پہنچنے کے بعد، شیشے کو چھوڑ دیں اور اسے شیشے کے شیلف پر رکھیں. پورے آلے کی ساختی استحکام بہت زیادہ ہے، جس سے ہینڈلنگ میں بہت بہتری آتی ہے۔ کارکردگی
شیشے کے لیے اس گینٹری ٹرس ہینڈلنگ ڈیوائس میں کالموں پر نصب کالم اور کراس بیم شامل ہیں۔ کراس بیم سلائیڈ ریلوں کے ساتھ نصب ہیں۔ سلائیڈ ریلز ایک ٹرانسورس سلائیڈنگ ڈیوائس کے ساتھ لگائی جاتی ہیں۔ ٹرانسورس سلائیڈنگ ڈیوائس عمودی سلائیڈنگ ڈیوائس اور نیومیٹک سکشن کپ ڈیوائس کے ساتھ نصب ہے۔ یہ محسوس کیا جا سکتا ہے کہ نقل و حمل کا طریقہ کار تین جہتی جگہ میں ایک مقررہ نقطہ پر حرکت کرتا ہے، سکشن کپ کے ذریعے شیشے کو چوستا ہے، پہلے X-axis پر پیچھے سے حرکت کرتا ہے، پھر 90 ڈگری کو متعین مقام پر پلٹتا ہے، اور پھر اوپر کی طرف بڑھتا ہے۔ اور نیچے Y-axis پر۔ سیٹ پوزیشن پر پہنچنے کے بعد، شیشے کو چھوڑ دیں اور اسے شیشے کے شیلف پر رکھیں. پورے آلے کی ساختی استحکام بہت زیادہ ہے، جس سے ہینڈلنگ میں بہت بہتری آتی ہے۔ کارکردگی

پوسٹ ٹائم: مارچ 18-2024



